|
|
Optimization of Robot Way-Point Path
ENSC 426 Introduction to Engineering Optimization, Spring 2016, SFU
Use of optimization toolboxes and strategies in MatLab to optimize the navigation path of robot traversing a 2D plane using way-point navigation.
Download Report (.pdf)
|
|
 |
|
Miniature Segway Modeling and Control
ENSC 483 Modern Control Systems, Spring 2016, SFU
Simulation and control of a miniature Segway in simulink using linear state space methodologies, followed by construction and attempt to program the controller on an embedded system.
Download Report (.pdf)
|
|
 |
|
Robot Modeling and Control
ENSC 488 Introduction to Robotics, Fall 2015, SFU
Design and rendering of a mobile robotic arm in OpenGL. Project aimed at designing and implementing forward/inverse kinematics control strategies, state space path planning, familiarity with jacobians and robot C.G. checking in a simulated environment.
Download Report (.pdf)
|
|
|
|
 |
|
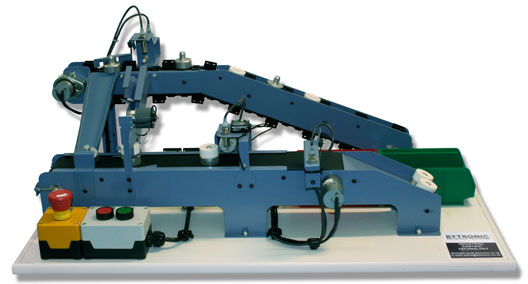
Robot Pen
MSE 450 Real-Time Control Systems, Spring 2015, SFU
Structural design, electronic assembly, and real-time control system development (featuring a non-linear controller based on sliding mode control SMC) for realizing a robotic pen with 3 degrees of freedom capable of writing on a horizontal piece of paper.
Project Video (youtube link)
Download Report (.pdf)
|
|
|
|
 |
|
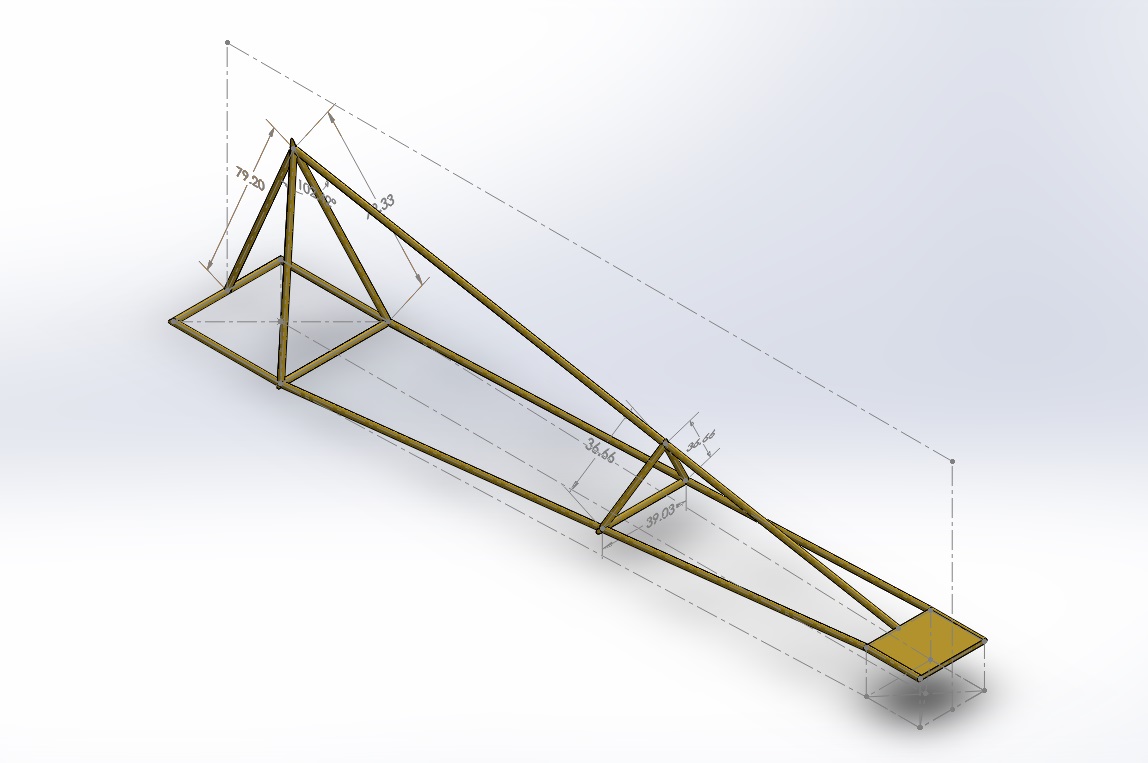
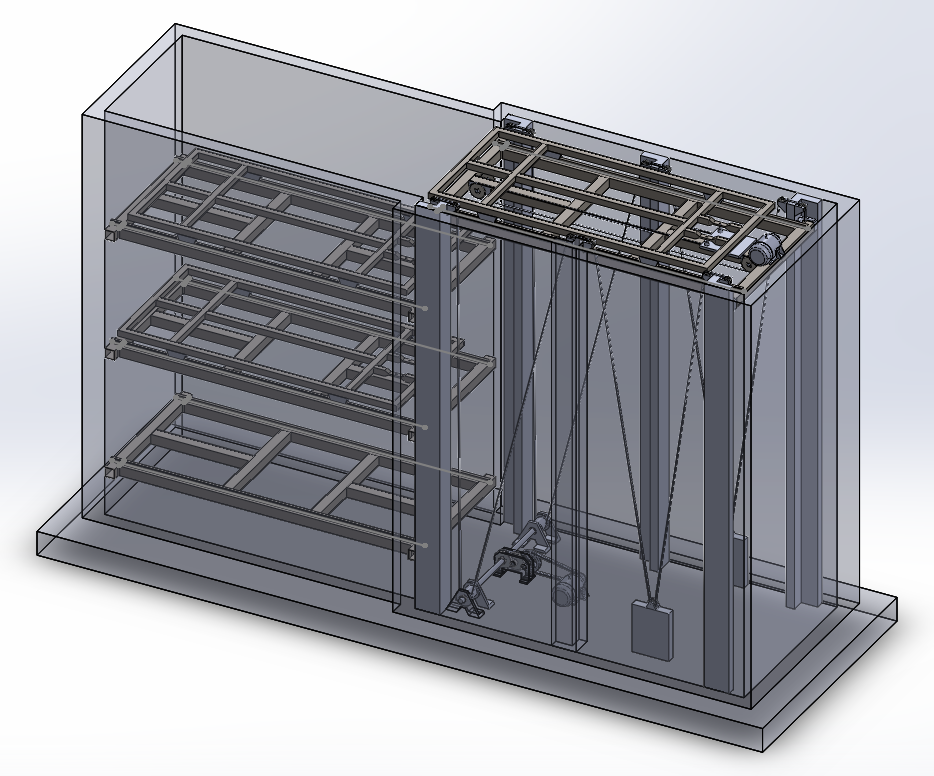
Car Self-Parking System
MSE 320 Machine Design, Fall 2014, SFU
Design and structural study of a simple car self-parking system with implementation mindset. Involved structural analysis of components using personally designed matlab scripts and stress analysis in SolidWorks, selection of off-the-shelf components such as gars, pulleys, and motors using empirical formulas for machine design, and comparison to existing technologies.
Download Report Part 1 (.pdf)
Download Report Part 2 (.pdf)
|
|
|
|
|
|
 |
|
Simulation Project
MSE 321 Engineering Thermodynamics and Heat Transfer, Fall 2014, SFU
Project concerned with the thermodynamic simulation of the air conditioning system in commercial airliners.
Download Report (.pdf)
|
|
 |
|
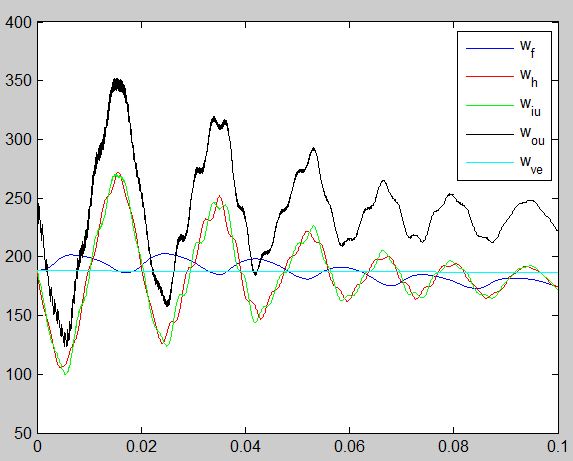
Design, analyze, simulate and fabricate a dynamic system which displaces a ball from the top left corner of a 12"X12" 2D vertical board for as long as possible to a rest in the bottom right corner. Simulation of the system was done using MATLAB, characterized by physical properties of the system which were acquired through individual component testing.
|
|
 |
|
Simulated Fluid Mechanics Study for Elliptical Cylinders
ENSC 283 Introduction to Fluid Mechanics, Spring 2013, SFU
Project for simulated study of effect of parameters such as velocity, aspect ratio, and attack angle, on the drag and lift forces for an elliptical cylinder using ComSol.
Download Report (.pdf)
|
|
![]() |
|
Truss and Frame Analysis
ENSC 281 Statics/Strength of Materials, Fall 2012, SFU
Group project for theoretical truss and frame analysis of luffing jib boom crane, Manitowoc 31000.
Download Report (.pdf)
|
|
![]() |
|
Research Project
ENSC 231 Engineering Materials, Fall 2012, SFU
Research report on selection of suitable material and corresponding processing techniques for the production of flexible & stretchable conducting wires, as a part of a electronic circuit embedded in a soft robot.
Download Report (.pdf)
|
|
 |
|
Various projects dealing with introduction to the mechatronics mindset using lego NXT bricks and mechanics kits.
|
|