Robotics Design - "Edro"
Interactive robots with five different emotions
Role:
Coder
3D Modeler
Designer
Report Manager
Prototyping
Team:
Matteo Sinico
Martin Silvio Di Pietro
Tommaso Da Col
Ioannis Koutoulogenis
Martina Kiselichka
Ruilin Zoe
Tool:
Arduino
Processing
Maya
Final Cut
Content:
Academic Project
2 months / 2018


Intro
Edro:
The project is about an interactive robot which can express five different emotions, according to the interaction with the user. The robot provides rich expressive capability which are joy, disgust, fear, anger and sadness.
Main Feature:
The interactive robot which has the ability to demonstrate five different emotions through the interaction with its surrounding. The five different emotions which are joy, fear, disgust, sadness and anger they will be displayed through the movement of the robot itself and various sound and light effect.

Robot Inside
Inspired by the idea of the robots Luxo, Lou, Cozmo and Yeti we have came to the idea of creating robot that has the similar functions, showing emotions as a happiness, sadness, anger, disgust and fear called EDRO. EDRO is a special robot that has very simple shape with which we show a total diversity of human emotions.
Five emotions of the interactive robot:
1. Joy: Fast indipendent movements of the wings and moderate shaking of the body. Color - yellow or multi color
2. Fear: wings close fast and the body is shaking rapidly, like it is vibrating. Color - violet
3. Anger: Lateral wings closed and the front one open in a rigid way and the body is moving fast straight in the front (like attacking). Color - red.
4. Sadness: Wings open in a slow way and go down, going backward slowly. Color - blue (blinking smoothly).
5. Disgust: only the front wings open down and the other two wings are closing , going backward and shaking the body, like it’s shaking its head. Color - green.
Sketch and 3D Model
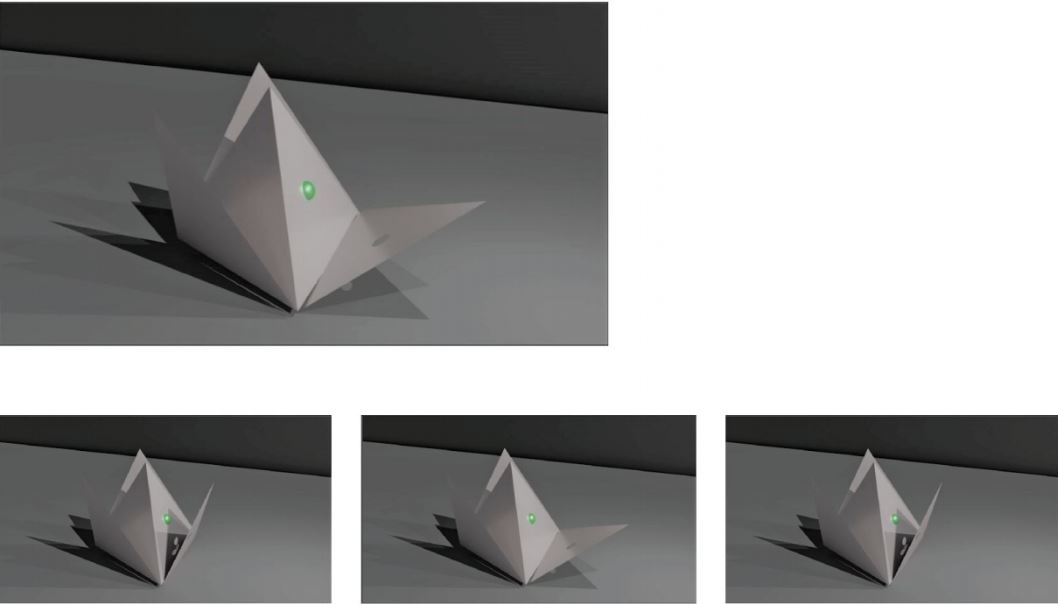
The "DISGUST" mode of robot
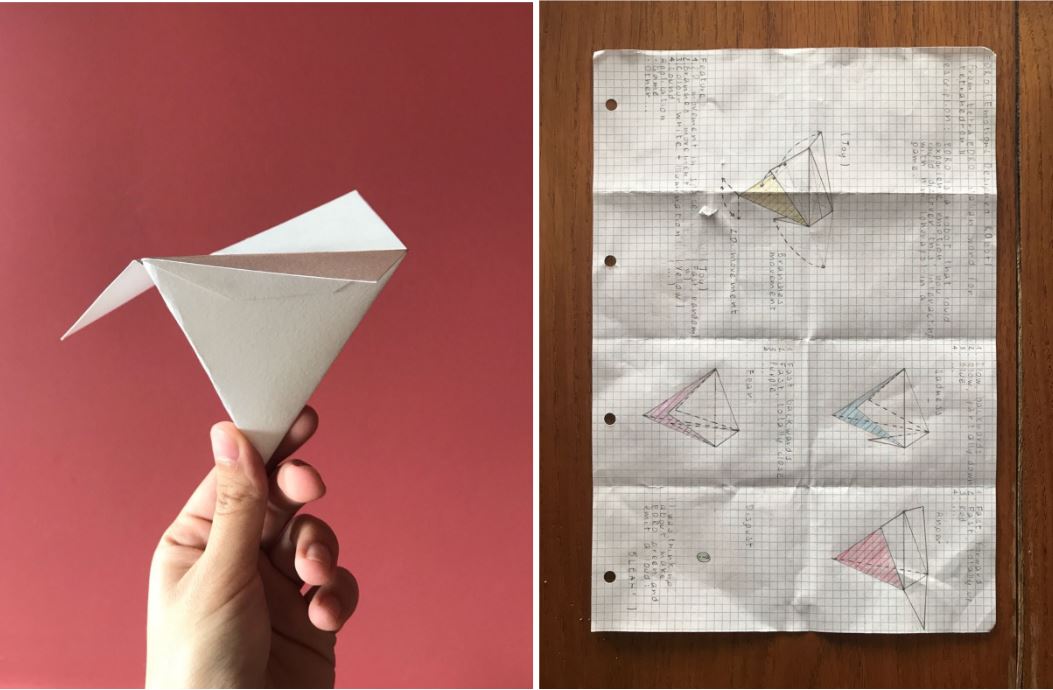
Sketch
The Process
Aesthetics :
white color, basic, clean.
Light :
change adapt to the emotions
Materials used :
- base and structure: laser cutted MDF (medium density fiberboard) 2 mm of thickness
- cover: Spandex (LYCRA®)
Process :
1. Sketch the idea of shape and structure
2. Cad design of the shapes of the structure
3. Check and choose the best material keeping in mind that post-works
4. Laser cut the material
5. Mount every shape to build the final structure and the Spandex cover to finish the
aesthetics.
Structure:
It is a tetrahedron composed by a laser-cutted modular structure, that takes shape through joints solutions.
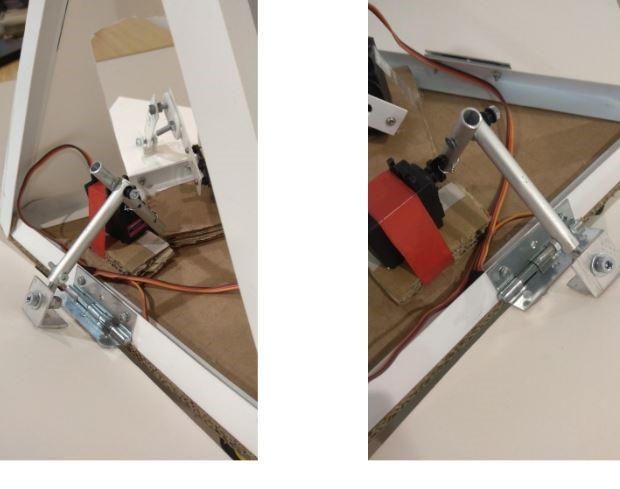
Process 1
Process 2
Interaction
Interaction diagram
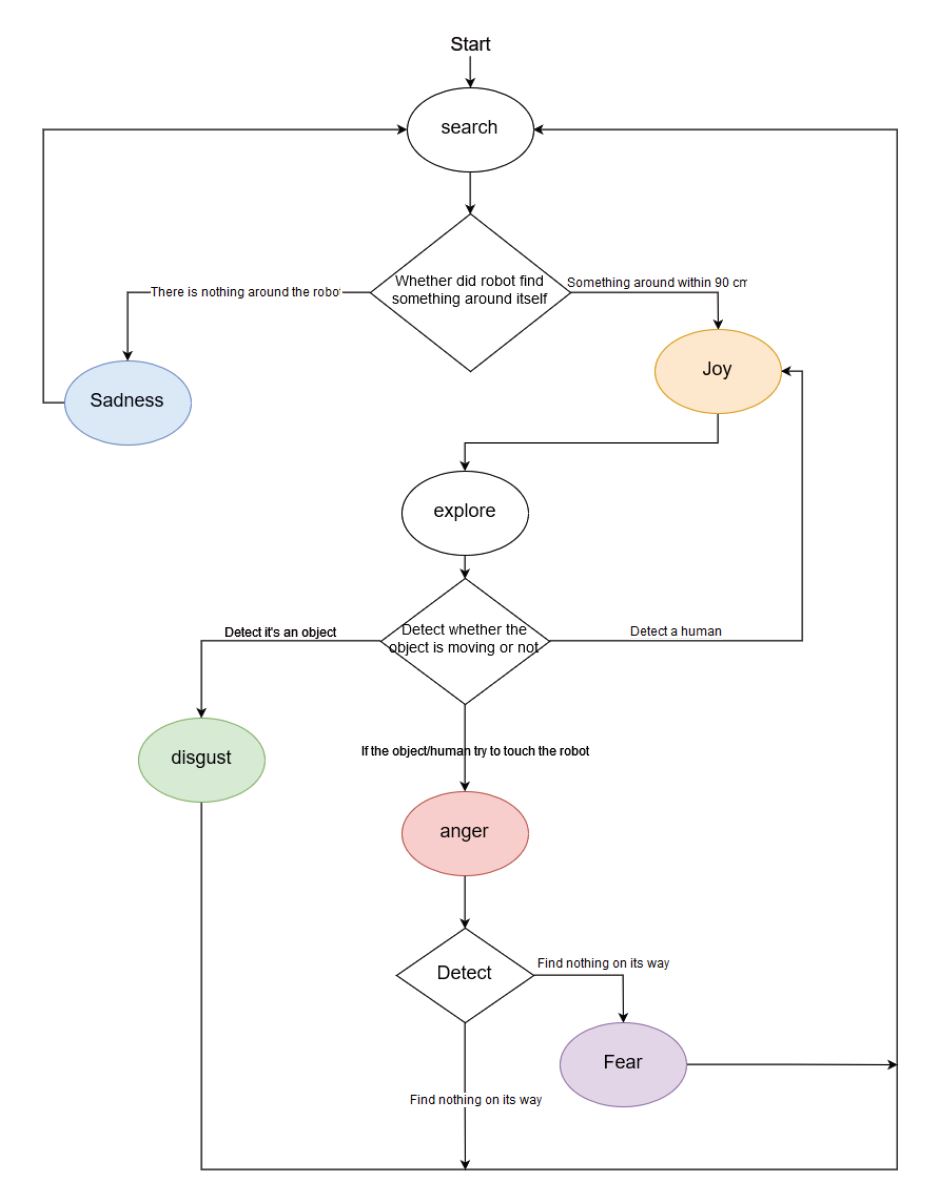
The starting state of the robot is searching.
If the robot’s distance sensor detects any object within 90 cm, the robot will express joy.
Otherwise, the robot will express sadness and come back to the first state which is searching again.
After the robot express joy emotion, it will start to detect the movement of the object that it found, if the distance between the object and robot itself is changing(decreasing), robot will detect the object as human. Otherwise, the object will be detected as a still object.
In the third state, if the object/human try to touch the robot, the robot itself will express anger.
And if the distance between the robot and human are still decreasing, the robot will express fear and then come back to the first state which is searching again. The detailed interaction flowchart is shown on the left.
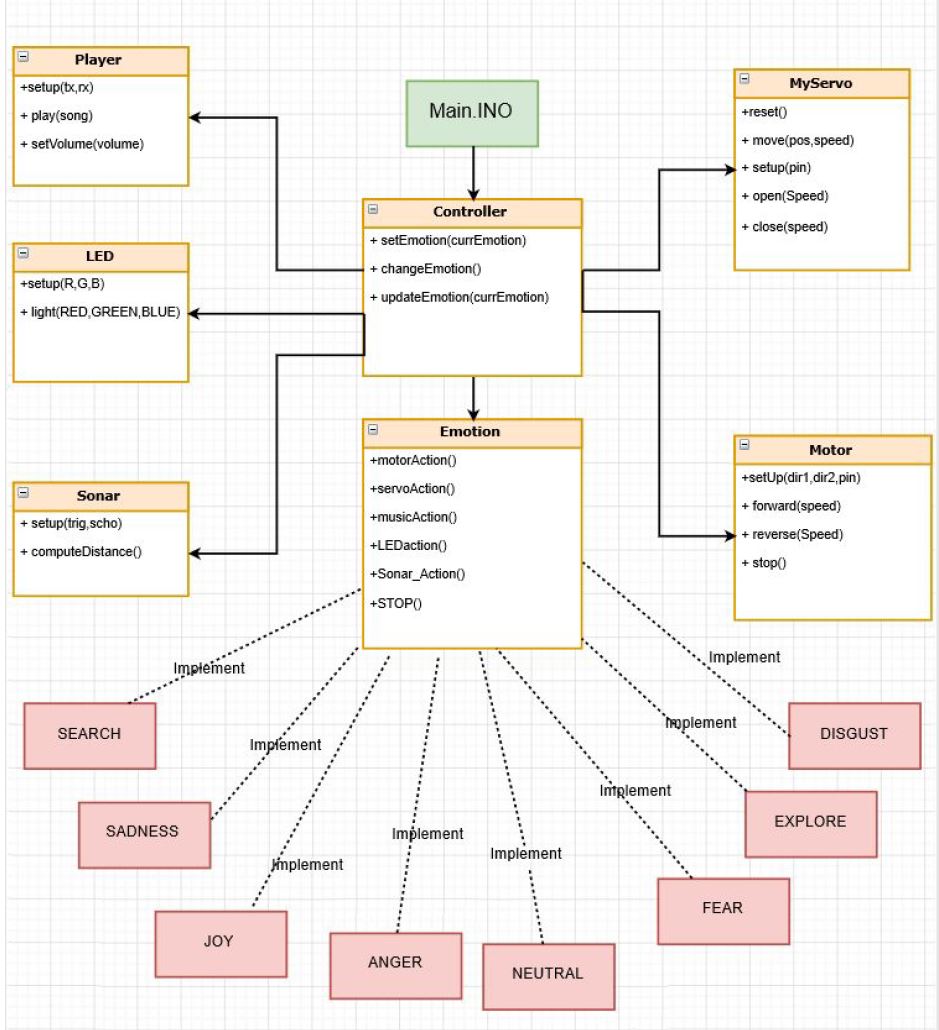
Controller Class
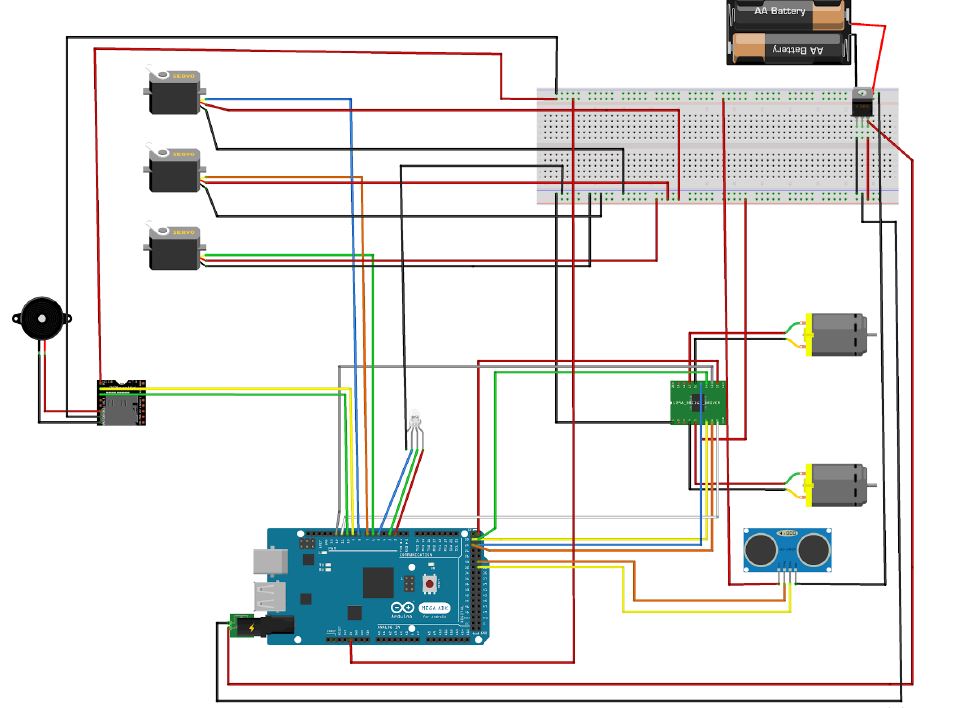
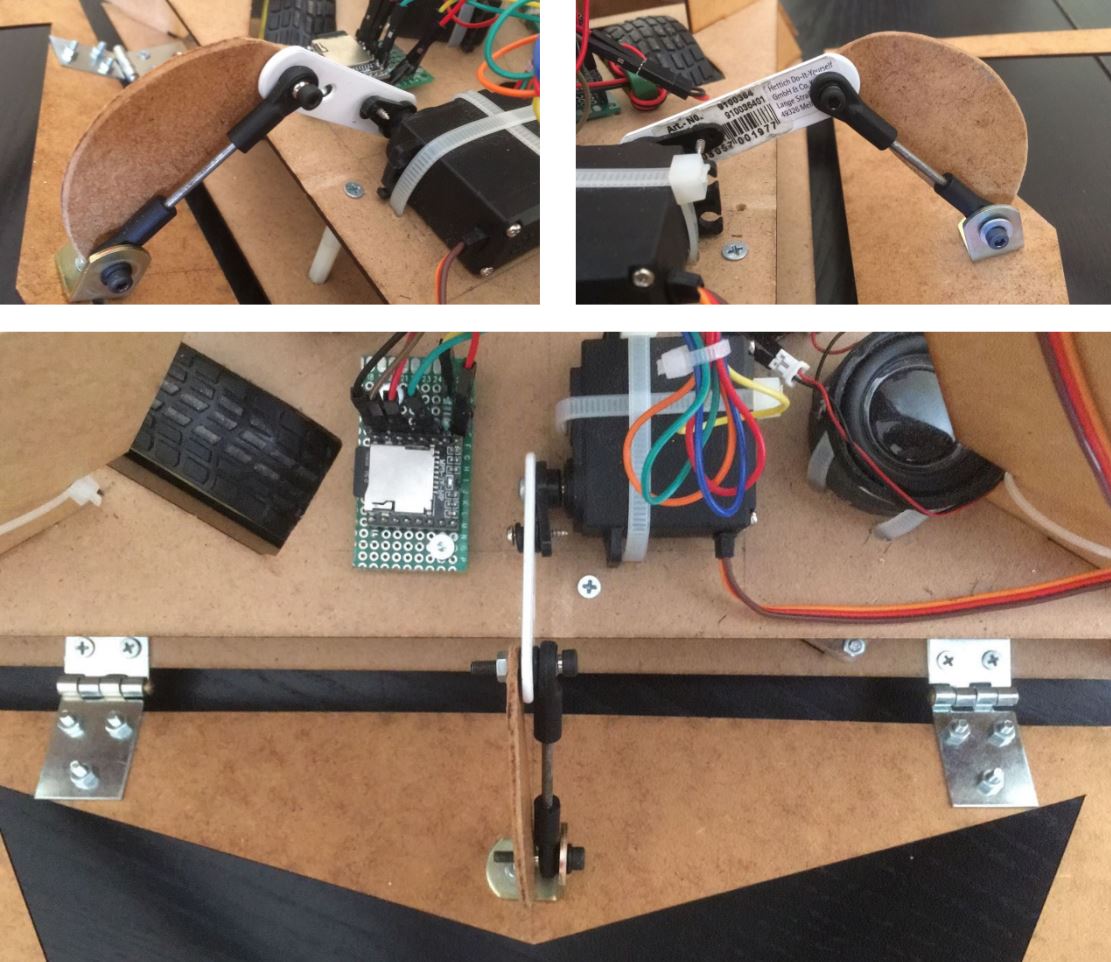
Electronics
Reflection
For this project, I have mainly worked on the part of the robot interaction coding, interface design, material picking, assembly combining and controller, informatic and part of the electronic class diagram designing. As a visual designer, during the early stage of the project, I created the early 3D version of the robot and also created the final rendering video for showcase and marketing.
For this interactive robot project, it was absolutely a fun experience building this robot. Every step from scratching to the final building involves a lot of group work. And from designing the robot appearance to build the final mechanic and interaction inside, every step involves careful decision making. And throughout the whole period which is roughly around two months, the team are constantly improving our design according to the suggestion and weekly feedback from the professor.

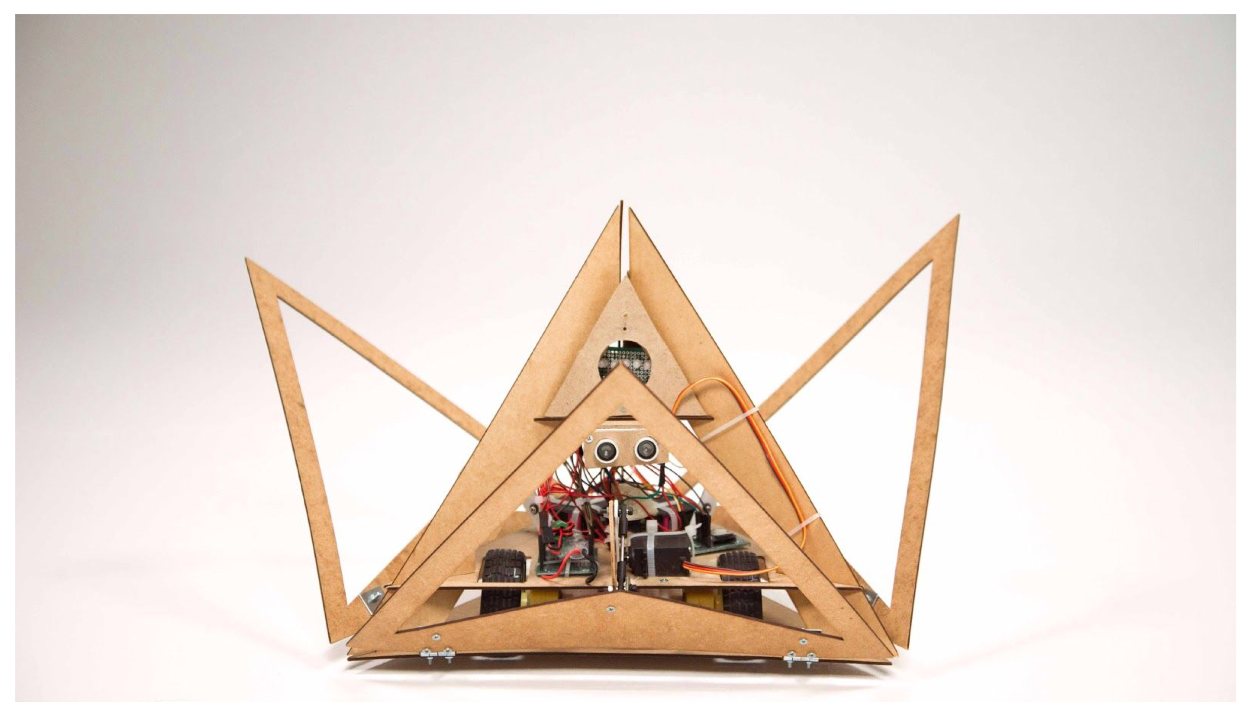
Final Model(without cover) 1
Final Model(without cover) 2
Value
I have learnt the importance of cooperation and being organized at all time. Each team member individually is also working towards the best result of the robot. Everyone has a different cultural and academic background, so we divide the work wisely according to the role of the member. Everyone has their own focus area and is also work on the whole structure of the project at the meantime.
Throughout the building process, I have also encountered several difficulties. First challenges was the mechanic, it is easy to make a movement, but it is hard to have a vivid movement with aesthetic perception. So after several versions of mechanism testing, we have finally decide on the right one.
During the making of the robot, the other challenge was related to the distance sensor. As we planned the layer of the wings should be two. While the thickness of the material(fabric) is affecting the performance of distance sensor, so after several adjustment, as a designer I have decided to keep only one layer.
Moreover, when we were at the final stage of building the wheels of the robot, the servo motor burnt in an incidence. And there is countless times that we could not find the perfect material at the right time, or run out of the screws or some other stuff.
But none of these problem or difficulties has affected the project, in the final stage, as a team we have succuessfully accomplished the ultimate edition of our interactive robot.
Final Video length 2 mins