Nicholas Polyzogopoulos
SFU SAT:
RF Communications System
SFU SAT is a 3U cubesat (30cm x 10cm x 10cm) being designed by students and alumni of Simon Fraser University, with the support of some faculty members. This Satellite is for the 5th round of the Canadian Satellite Design Challenge (CSDC), spanning from fall 2018 to spring 2020. The competition sees over 15 top universities competing to design the most compelling cubesat that can conduct a given science mission. The competition includes several workshops and critical design reviews, as well as testing at the David Florida Laboratory.
The goal of CSDC 5 is to create a "selfie sat" that can take images of a given location and then downlink the images to amateur radio operators (AROs). The satellite will also be sending out written canadian stories via radio. The goal of this is to promote public engagement with space missions, as well as serve as an emergency communication link for the government of Canada.
 |
|---|
| An early prototype of SFU SAT |
| Table of Contents |
|---|
| ARO Mission Operation |
| Mission Control |
| SATNOGS Operation |
| Design Overview |
| Radio Modules |
| Antenna Modules |
| Mission Control Center |
| Link Budget |
| Resources |
ARO Mission Operation
An outline of the operation of the selfie sat is as follows:
- AROs from around the world contacts the mission control center (MCC) to request a “Selfie-Sat Pass”. The AROs send the MCC the location (latitude, longitude) of the centre point of the desired space selfie image.
- MCC responds to ARO with information about the Selfie-Sat Pass start and end times, and a password that the Amateur Radio Operator will use for the pass.
- The MCC will uplink the required roll angle (≤ 25 deg) for Selfie-Sat to be able to point the camera boresight (middle of the image) at the ARO’s specified location during the pass.
- During the pass, the ARO will contact Selfie-Sat, and will uplink the command to acquire an image when Selfie-Sat is over the desired imaging area.
- An image will be acquired during a Space-Selfie Pass. As soon as the command is uplinked, Selfie-Sat will immediately take the “space-selfie” photo with the Selfie-Cam payload imager.
- Selfie-Sat will then immediately begin to downlink the Space-Selfie photo to the ARO. During a pass, Selfie-Sat may also downlink other information, such as a list of recent downlinks, or other material determined by the CSDCMS (TBD).
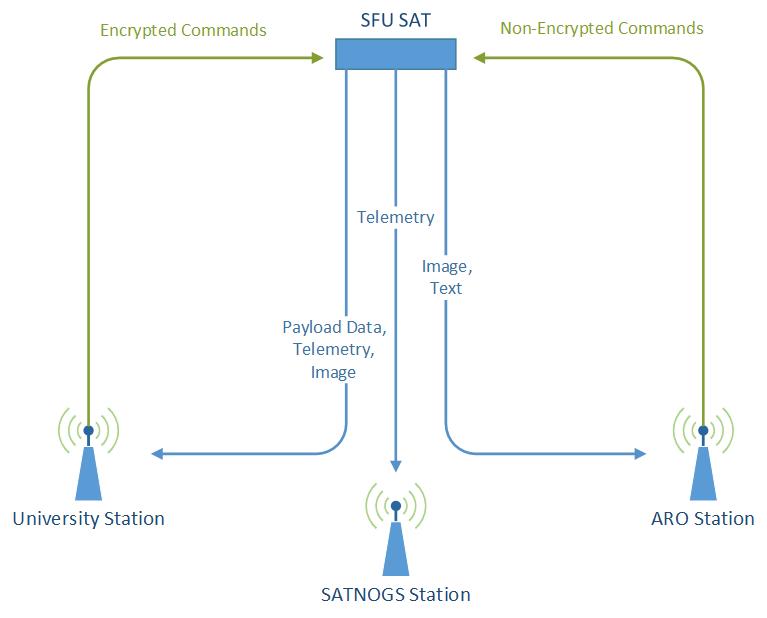 |
|---|
| System overview of the RF communications system for SFU SAT. (Image: Nicholas Polyzogopoulos) |
Mission Control
The mission control center (MCC) is a ground station to be constructed at Simon Fraser University (SFU) in order to control the satellite's operation. The MCC will have it's own communication link to the satellite, on a separate frequency, in addition to being able to utilize the ARO link. The MCC link utilizes the 10-10.5GHz amateur band. All commands and data sent over this frequency will be encrypted.
SATNOGS Operation
SFUSAT will be designed with the ability to send telemetry-only data to known SATNOGS stations during a pass, based on their location data. SATNOGS is a network of amateur radio ground stations, where observations of various satellites can be compiled. Decoder structs will be provided for simple reception of telemetry from SATNOGS operators. Telemetry frames will be viewable on SATNOGS DB.
Design Overview
Below is a brief overview of the RF communications system. The details of the system may change over time; therefore, this is merely a overview of the system as of date.
Radio Modules
The RF team designs it's own radio PCBs (since CSDC4). For CSDC 5, the RF PCB is modular: the design is divided into separate boards, one for each frequency. This allows us to throw away or revise only the board for the particular frequency system that isn't functioning. By doing so, overall construction time is reduced (the PCBs are hand soldered). Both radio modules are controlled by the onboard computer (OBC), and interact with their respective antenna modules.
UHF Module:
- TI CC1101 transceiver
- Qorvo RFFM 6406 front end module
- SAW filter
X-Band Radio Module:
- TI CC1101 transceiver
- Qorvo TGC2610-SM downconverter and LNA
- SAW filter
Antenna Modules
There are two antenna modules, one for each frequency. The UHF antenna module consists of 4 elements which are stowed in a compartment until after launch, when they are deployed and form an "+" or "cross" pattern. This type of antenna is called a turnstile, or sometimes a crossed-dipole. The turnstile antenna is essentially two dipoles positioned at right angles to each other, with one being fed 90 degrees out of phase. By shifting one of the dipoles by one quadrature, the polarization of the antenna becomes circular. This is useful, since circularly polarized links are not affected by faraday rotation and less susceptible to attenuation by rain fade. By comparison, the radiation from a linearly polarized antennas will suffer from faraday rotation when passing through the ionosphere (at least for UHF frequencies). This can cause loses and make it difficult to align with the polarization of the receiving antenna (if the receiving antenna is also linear). The turnstile antenna has a mostly omnidirectional radiation pattern, marked by slightly more accentuated lobes at low elevation. This is advantageous for LEO satellites, since most of the time spent during a pass is at lower elevations (due to the changing relative speed of the satellite to an observer on the ground).
 |
|---|
| An example of a cubesat employing a deployable turnstile type antenna (Image source: PW-Sat2) |
The elements of the turnstile antenna are composed of short lengths of measuring tape. Measuring tape is made from spring steel, a conductive shape alloy. High conductivity makes the measuring tape appropriate for antenna use, while flexibility allows the elements to be rolled into a small compartment. The 4 elements that make up the turnstile antenna are stowed in individual compartments, one on each side of the satellite. Each compartment has a deployment door, sealed shut with a nichrome wire. By applying a current to the nichrome wire, the wire is burned and the force being applied to the door from the measuring tape causes it to open. The antenna elements unravel to their original shape, forming the desired crossed shape.
The UHF antenna module is located near the top of the satellite, where the top is nadir-facing (away from earth). It uses a Anaren Microwave 11303-3 IC to quadrature phase shift one of the dipole feeds. The X-band antenna consists of an array of chip antennas on a ground plane PCB. This module is located on the nadir-facing (towards earth) face of the satellite.
Mission Control Center
The mission control center consists of a radio, antennas, antenna positioning system, and related equipment. The radio used is a software defined radio (SDR) called the LimeSDR mini. A SDR has the advantage of defining many of the radio's characteristics with software - allowing for a customized radio at low cost. This allows us to implement the modulation mode, data link layer protocol, error correction, and other characteristics as we choose. In our case, the SDR is configured for MSK modulation, uses the AX.25 protocol and uses forward error correction (FEC) while interleaving/deinterleaving the signal.
 |
|---|
| The software defined radio (SDR) system, connected to a test-use low noise amplifier (LNA) module. The SDR is located in the larger aluminum enclosure, while the LNA is enclosed in the smaller enclosure. Aluminum enclosures are used due to their thermal conductivity and EMI shielding properties. The PCBs are mounted with a thermal transfer pad between them and the aluminum surface, allowing for a significant reduction in operating temperature. (Image: Nicholas Polyzogopoulos) |
The antennas used include a circularly polarized Yagi antenna for 435 MHz, and a offset-parabolic dish with a feedhorn for the X-band frequencies. These antennas are highly directional, so they require motorized tracking systems in order to point the antennas directly at the satellite as it passes by. Since the satellite will be in low earth orbit (LEO), passes are relatively quick. Therefore, the motors must be agile yet precise, otherwise the signal will degrade from pointing losses. The tracking system consists of a motor for elevation rotation and a motor for azimuth rotation. The MCC also uses a variety of other equipment, such as LNAs, power amplifiers (PAs), a reference oscillator, power supplies, and an upconverter.
 |
|---|
| An example of a LEO satellite ground station: two circularly polarized Yagi antennas, one for UHF and the other for VHF. The antennas can be oriented relative to azimuth and elevation by motors attached to the mast and cross-boom. (Image source: PW-Sat2) |
Link Budget
Calculations were initially performed using the Friis equation in order to get rough estimates of the link margin. Following this, the AMSAT / IARU Annotated Link Model System (by Jan King) was used to attain a link budget using additional parameters.
 |
|---|
| The Friis Transmission equation, where PR is power received, PT is power transmitted, GT is gain of the transmit antenna, GR is gain of the receive antenna, c is the speed of light, R is the separation between antennas, and f is the frequency. |
Resources
| This content was written by Nicholas Polyzogopoulos, and has also been used for the SFU SAT RF wikipedia page seen here. |