Hardware
Since this is the first prototype, the hardware mostly consists of off-the-shelf components put together using cardboard and adhesive tape.
Contents:
Headset
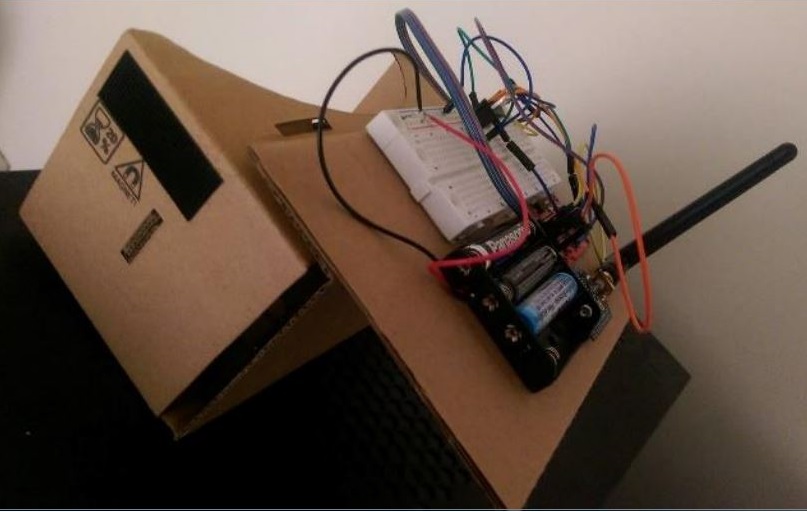
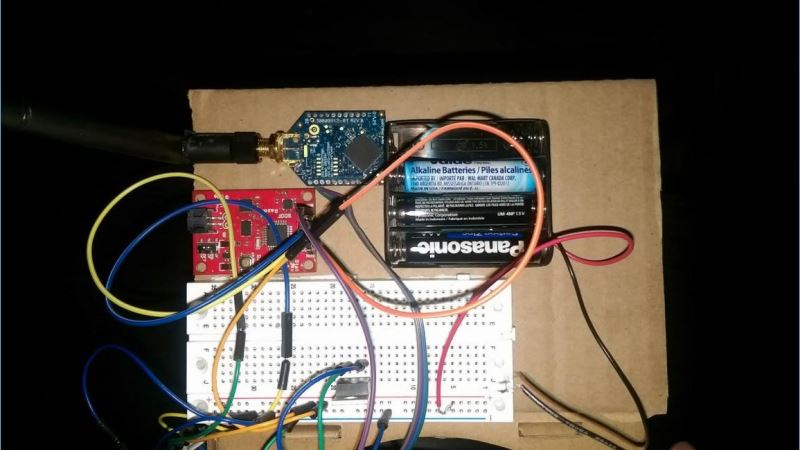
The headset is made by modifying Google Cardboard. As can be seen in the figures, the headset contains an IMU (Inertial Measurement Unit) with an onboard ATMEL ATMega 328 microcontroller, a wireless communication module (Xbee), power source, and a breadboard.
The onboard microcontroller in the IMU unit is configured to serially transmit data to the Xbee. The Xbee then wirelessly transmits the data to the other Xbee on the gimbal. Another function of the headset is to allow the user to see the cellphone screen placed inside the headset.
 |
 |
Gimbal Station
The gimbal station contains the gimbal (with servo-motors), and another wireless communication module (Xbee). The white box under the gimbal contains an ARM microcontroller (Texas Instruments TIVA C) and power source for the gimbal motors.
The TIVA C microcontroller is used to receive the headset IMU data through the Xbee wireless communication modules. This data is then processed to update the position of the gimbal motors. The gimbal also has an IMU unit on it which serves as feedback for controlling the position of the gimbal motors.
 |
 |